
SID, a charmingly British-sounding acronym for Structure, Isolation and Dynamics Research, was demonstrated in 1992. The project was run by Richard Hurdwell and instigated by Peter Wright, who had the foresight to understand that we would learn more about vehicle dynamics at Lotus if the Passive and Active development groups pooled their experience in a research vehicle.
With the exception of the original Active Esprit, all Lotus Active cars have had the static weight of the car carried on conventional springs, conventional damper units being replaced by Moog valve-controlled double-acting hydraulic actuators operating under the authority of a digital processor. As with all Lotus Active cars, the system depended on measurement of vertical wheel/tyre loads, with wheel displacement, hub acceleration, vehicle speed, handwheel angle and rate, brake inputs, rear steer angle, plus lateral, longitudinal, and yaw rate.
At the heart of SID. was the usual Cranfield-built digital controller containing an improved version of the Lotus Active algorithm, which as before, could separately modify the response of each chassis parameter and cleverly re-combine the different modes (roll, pitch and heave) to provide an appropriate actuator response. In other words, Lotus Active enabled all the body modes to be decoupled (or not). There was virtually no limit to the stiffness, damping, modal behaviour, roll stiffness distribution (speed dependent if required) that could be programmed entirely independent of one another. One refinement was the ability to non-linearise the damping characteristics and split the function into low, medium and high-speed damping in both compression and rebound, as on a normal shock absorber.
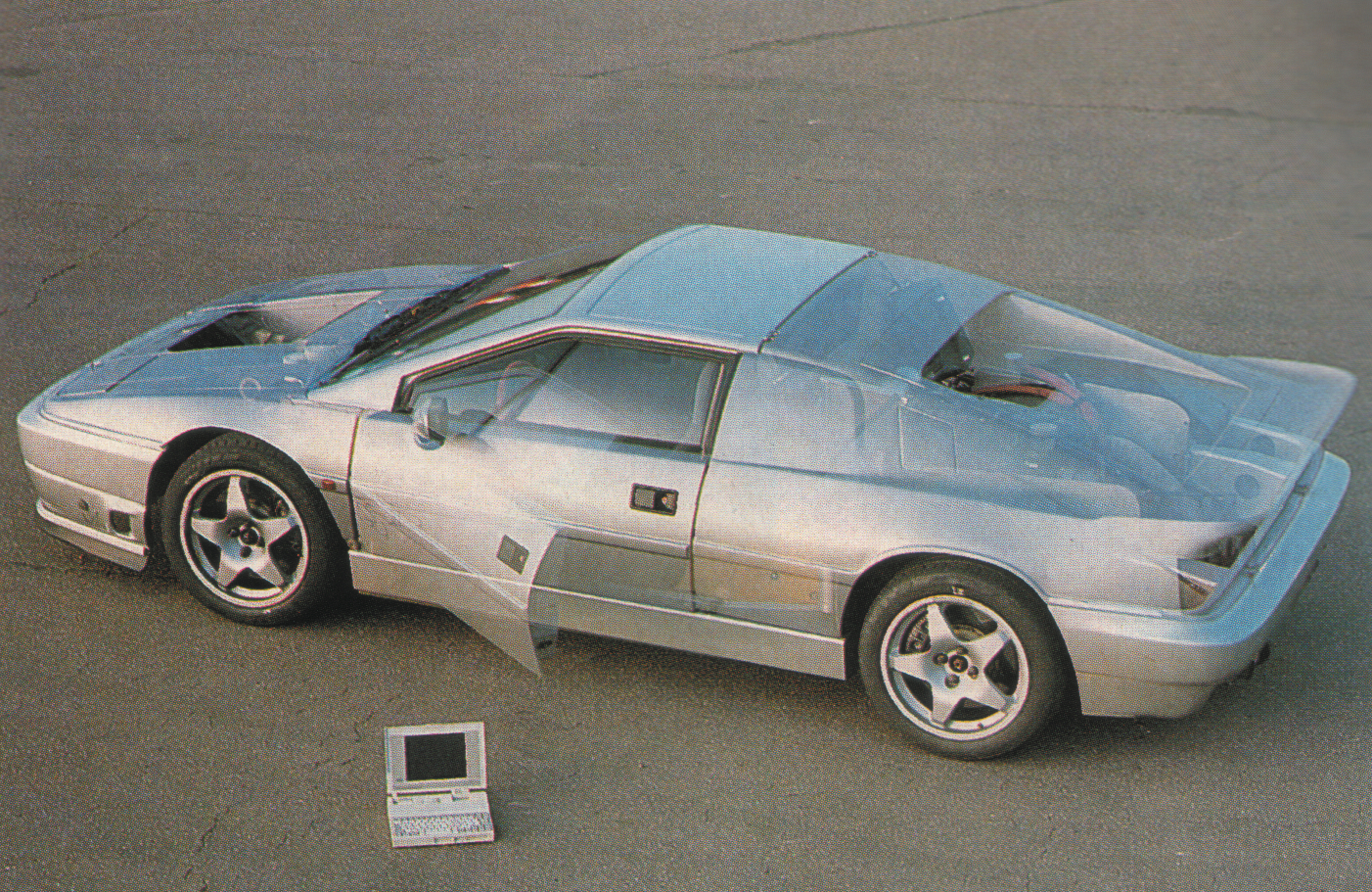
Every suspension parameter could be tuned at the touch of the laptop keypad and while on the move if necessary. The Active controller was in itself a data acquisition system so the data could be stored and downloaded for further analysis. The sampling rate was 1KHz, and the system was unique in being able to take complete and continuous control over tyre loads at up to approximately 25Hz.
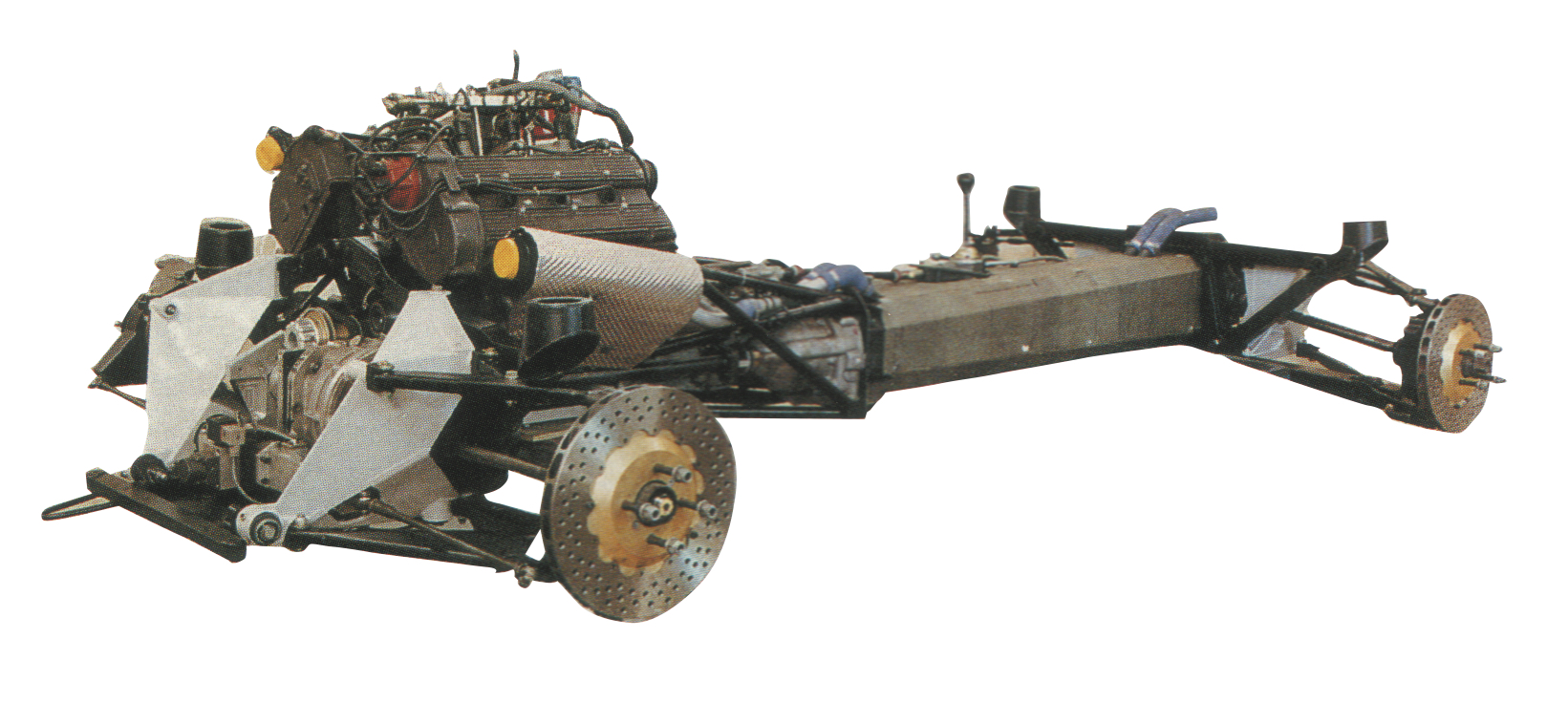
SID. was so much more than just an Active suspension development vehicle. For isolation research the suspension modules were attached to ‘rafts’ (like the FWD Elan) enabling high caster and camber stiffness, yet independently variable longitudinal compliance. These modules were in turn hung from frameworks on the front of the steel backbone and gearbox, respectively, the backbone providing a connection and transmission tunnel for the 300bhp Metro 6R4 V6 4X4 powertrain.
Experiments were to take the form of trying to understand the relative weights of suspension, powertrain, and complete body isolation. To this end the suspension subframes could be isolated from the body (or not). The powertrain could be isolated from the body (or not), while the body could be flexibly mounted to the backbone chassis (or not). A considerable part of SID’s 16,000Nm/deg torsional stiffness came from the Martin Ogilvy-designed structure.
For me, the most interesting feature was SID’s Active rear steer. Since working on the FWD Lotus Elan and Lotus Carlton that had both performed better dynamically with slightly oversteering rear axles, Lotus had become very interested in better understanding rear steer and its effects on yaw behaviour, stability at varying speeds, and especially on-limit handling. On SID the rear rack could be locked in the central position for passive steer or made Active to achieve any desired lateral steer effect during a transient manoeuvre.
The rear steer algorithm compared the measured lateral and yaw acceleration with the driver’s demands and continuously controlled rear steer angle appropriately. The control algorithm could convert driver inputs into true vehicle trajectory commands. Rapid response could be initiated, but provide an equally rapid transition back to an appropriately damped steady state. This ability could only be achieved with tyres that had the capacity to deliver the necessary response. Fortunately Michelin took a considerable interest in the development program because initial testing highlighted limitations with the initially supplied production rubber. New constructions were provided from which a better construction was selected, after which Active rear steer could be fully exploited. Lessons were learned about tyre capacity and weight/inertia distribution.
In essence we were playing about with yaw centre, or the virtual pivot axis about which the car yawed. It was clear that the further the yaw centre moved forward, the less stable the car felt. This was no surprise, but being able to continuously modify this important handling characteristic and change it with vehicle speed was very beneficial in our understanding of tyre and vehicle interaction.
Although it could be run in RWD form, SID was only run as a 4X4 during its test life and with a standard 6R4 Salisbury LSD in the rear axle and a viscous LSD in the epicyclic centre differential that gave a 35/65% front/rear torque split.
The cockpit was very cramped due to a very wide transmission tunnel. Fortunately I got on well with my driving partner George Howard-Chappell – or “dangerous George” as he was affectionately known. With the hydraulic pump whining and Metro VR6 rally engine howling away behind us, the first impressive feature was the solid structural feel of the car compared with a normal Esprit or any car for that matter – no shake, or body rattles.
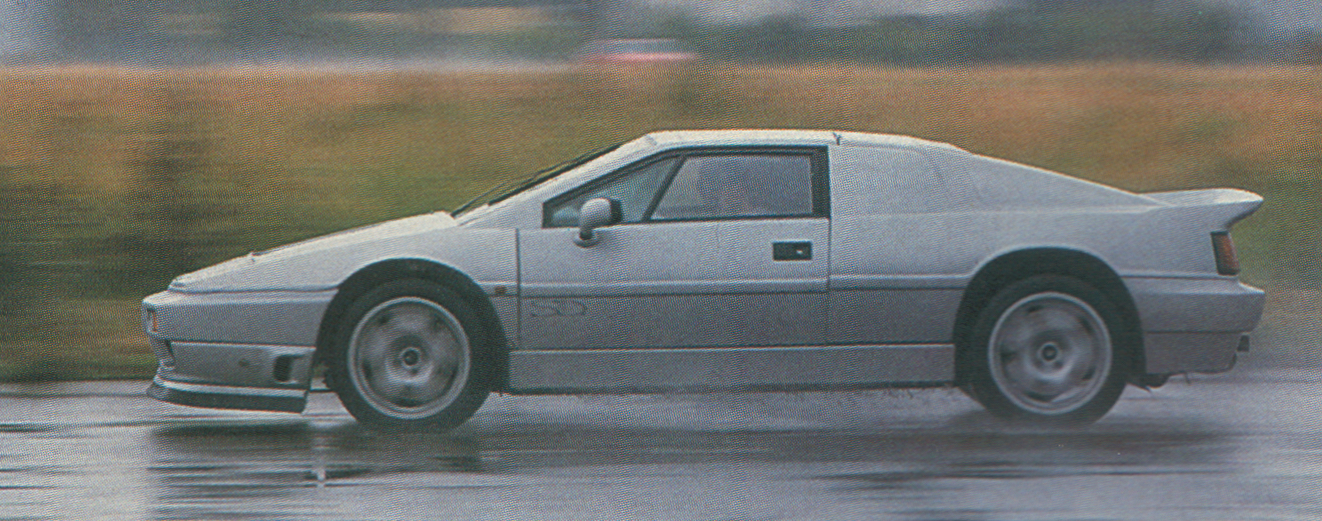
Initially, the basic chassis tuning program came up with the same answers as previous Active programs. The car was felt to roll quite a lot on the tyres if we didn’t compensate by pushing the outer wheels down a little in a corner. Virtually no body roll in or out was best, but we liked a little pitch down as this seemed to give the driver more braking feel. Even pitching the front of the car up under braking was better than zero. In straight ahead, the actuators simply put the wheels where they needed to be to maintain constant contact patch loads and an undisturbed body. Roll stiffness in the old sense was no longer meaningful because tyre loads, and therefore every aspect of dynamic behaviour, were being controlled individually and continuously. The car started to become very impressive in a 96km/h (60mph) lane change. Lateral acceleration peaks of over 1G were achieved in the wet with our heads banging on the cant rail and no overshoot at all.
Front bump steer is always important in controlling the response phasing between the front and rear axles. One is normally looking for bump/roll understeer (toe out) to stabilise the car, yet theory said that with the actuators extending slightly in a corner the front tyres should have been steered in the opposite direction (toe out with rebound) to get the same effect. It was found that the front bump steer worked in the conventional sense, possibly because even with Active, the outer wheels are being retracted (or moving into bump) as in the passive case, and when this happens, toe-out steer helps neutralise the stability-disturbing additional tyre thrust.
The ability to modify damping while on the move was a godsend since damping controls so much of what you feel. This immediate adjustability proved its worth when we wanted the Lotus F1 pilots of that time, Johnny Herbert and Alex Zanardi, to experience a succession of damper settings so as to agree a description between us how the car felt with each change. We would then relate better to the two rascals when setting up the Active Lotus T107.
On the road SID displayed an uncanny ability to ignore the primary body disturbances that affect virtually all normal cars. The facility to change the roll stiffness distribution with speed enabled highly manoeuvreable low-speed handling and extremely good high-speed stability.
As with all Lotus Active cars, secondary ride was the most difficult thing to optimise. The stiffer the actuator top mounts, the better the feedback from tyre load to processor and back to actuator corrective action. The higher the control bandwidth, the higher the top mount stiffness needed to be if secondary ride control was to be achieved with any consistency.
If anybody doubted the force potential of Active actuators, it was demonstrated when a faulty connector caused an actuator to suddenly fully extend. The violent body acceleration that resulted sent the whole system into positive feedback. We sat there being thrown about so violently that it took a huge effort and several attempts to hit the kill switch – or maybe it was because we were rendered helpless laughing.
The program was cancelled just as it was getting interesting. We never did run it RWD only or with the body isolated. Today SID languishes, corroding, rusty, but still complete and potentially usable outside factory 3 at Hethel. How sad.



 is influencing vehicle dynamics")